Selection
To properly size a brake or clutch, the operating parameters of MAXIMUM TORQUE (T), SLIP SPEED (rpm), and KINETIC POWER (watts) will have to be determined. Once calculated, these parameters can be used to select the proper size brake or clutch from the technical data provided in the Hysteresis Product Data Sheets. These parameters are easily calculated from system operating requirements such as: total web or strand tension (F); the radius of the full reel, roller, pulley, etc. (d/2); and linear velocity/feed rate (v). The following example is given to show the relationship of these system requirements to the calculation of the brake operating parameters. Since this example is not meant to cover all possible applications, the application data sheet is provided in the product catalogs. If additional assistance is needed, simply complete a copy of the data sheet and fax it to Magtrol. Our Application Engineering staff will be pleased to assist you.
Sample Problem – English
Select a brake to tension a 7-inch diameter payoff reel in a system requiring total (web or strand) tension of 2 lb and a process speed of 600 ft/min.
Solution:
Brake Torque (T) = Force (F) x Radius (d/2)
T = 2 lb x 3.5 in = 7 lb ·in
or T = 32 oz x 3.5 in = 112 oz·in
Slip Speed (rpm) = linear velocity (v) (in/min) / circumference (in)
rpm = (600 ft/min x 12) / (pi x 7 in)
rpm = 327
Kinetic Power (W) = Kinetic Power requirement is calculated using basic horsepower formula x 746 watts /hp
W = (T (lb·in) x rpm/63025) x 746
W = (7 lb·in x 327 rpm/63025) x 746 = 27 watts
 Quick Check:
Quick Check:
The curves to the left can be used as a quick check to verify the kinetic power calculation. Simply locate the required torque on the vertical axis, move horizontally until you intersect the appropriate speed line, and then read vertically (up or down) to obtain the resulting watts or horsepower.
Selection:
From the Hysteresis Brake ratings it can be seen that an HB-140 Hysteresis Brake which has a rated torque of 140 oz·in, a maximum speed capability of 12,000 rpm, and a kinetic power capability of 75 watts continuous, would be the proper selection for this application.
Note: In a clutch application, slip speed is the difference in rotational speed between the input and output members of the clutch assembly. If, in the above example, tensioning were being accomplished with a clutch inserted between a take-up reel and a motor driving at 500 rpm, the actual slip speed used to compute the kinetic power requirements would be 500 rpm (clutch input speed) – 327 rpm (clutch output speed = 173 rpm). The difference in speed would obviously impact the result for kinetic power.
Sample Problem – Metric
Advantages of Hysteresis Devices
Unlike many other torque control devices, Magtrol hysteresis devices provide absolutely smooth, infinitely controllable torque loads, independent of speed, and they operate without any physical contact of interactive members. As a result, with the exception of shaft bearings, there are no wear components. This provides such advantages as: longer expected life, superior torque repeatability, life cycle cost advantages, broad speed range, excellent environmental stability, and superior operational smoothness.
Long, Maintenance-Free Life
Magtrol hysteresis brakes and clutches produce torque strictly through a magnetic air gap, making them distinctly different from mechanical-friction and magnetic particle devices. As a result, hysteresis devices typically have life expectancies many times that of friction and magnetic particle devices.
Life-Cycle Cost Advantages
While the initial cost of hysteresis devices may be the same or slightly more than that of their counterparts, the high cost of replacing, repairing and maintaining friction and magnetic particle devices often makes hysteresis devices the most cost-effective means of tension and torque control available.
Excellent Stability
Magtrol hysteresis devices can withstand significant variation in temperature and other operating conditions. In addition, because they have no particles or contacting active parts, hysteresis brakes and clutches are extremely clean. Magtrol devices are used in food and drug packaging operations, in clean rooms, and environmental test chambers.
Superior Torque Readability
Because torque is generated magnetically without any contacting parts or particles, hysteresis brakes and clutches provide superior torque repeatability. Friction and magnetic particle devices are usually subject to wear and aging with resultant loss of repeatability. Magtrol devices will repeat their performance precisely, to ensure the highest level of process control.
Broad Speed Range
Magtrol hysteresis devices offer the highest slip speed range of all electric torque control devices. Depending on size, kinetic power requirements and bearing loads, many Magtrol brakes can be operated at speeds in excess of 10,000 rpm. In addition, full torque is available even at zero slip speed and torque remains absolutely smooth at any slip speed.
Operational Smoothness
Because they do not depend on mechanical friction or particles in shear, hysteresis brakes are absolutely smooth at any slip ratio. This feature is often critical in wire drawing, packaging and many other converting applications.
Magnetic Particle Brakes and Eddy-Current Brakes
Hysteresis Brakes are often confused with magnetic particle brakes and eddy current brakes, both of which operate and perform differently than Hysteresis Brakes.
Magnetic Particle Brakes
Unlike Hysteresis Brakes, magnetic particle brakes have a free flowing metal powder in the air gap. When a magnetic particle brake is energized, the particles form chains along the magnetic field lines linking the rotor to the housing. As the rotor rotates, the chains continuously shear, generating torque and heat. While magnetic particle brakes are capable of producing high torque, the friction between the particles can result in poor stability and repeatability, along with a high residual drag.
Eddy Current Brakes
Eddy current brakes develop torque by the direct magnetic linking of the rotor to the stator. This linking generates eddy currents in the driven rotor. Eddy current brakes must have a slip between the rotor and the stator to generate torque.
Principles of Hysteresis
 Operating Principles
Operating Principles
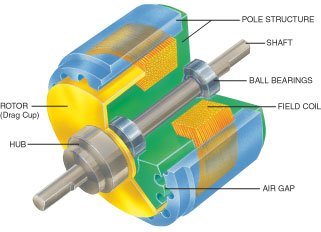
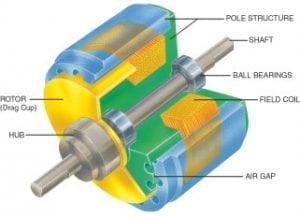
The hysteresis effect in magnetism is applied to torque control by the use of two basic components–a reticulated pole structure and a specialty steel rotor/shaft assembly–fastened together but not in physical contact. Until the field coil is energized, the drag cup and shaft can spin freely on its bearings. When a magnetizing force from either a field coil or magnet is applied to the pole structure, the air gap becomes a flux field. The rotor is magnetically restrained, providing a braking action between the pole structure and rotor. Because torque is produced strictly through a magnetic air gap, without the use of friction or shear forces, Hysteresis Brakes provide operating characteristics such as:
- Absolute Smoothness
- Torque Independent of Speed
- Total Adjustability
- Long, Maintenance-Free Life
- Highest Degree of Repeatability
- Quiet Operation
- Stability
Control
In an electrically operated Hysteresis Brake, adjustment and control of torque is provided by a field coil. This allows for complete control of torque by adjusting DC current to the field coil. Adjustability from a minimum value (bearing drag) to a maximum value of rated torque is possible. Additional torque in the range of 15-25% above rated torque may be available on some brakes.
The amount of braking torque transmitted by the brake is proportional to the amount of current flowing through the brake coil. The direction of current flow (polarity) is of no consequence to the operation of the brake. For optimum torque stability, a DC supply with current regulation is recommended. This will help to minimize torque drift attributable to changes in coil temperature and in-line voltage, which can result in changes in coil current, and consequently, in torque.






 Quick Check:
Quick Check: